強化學習
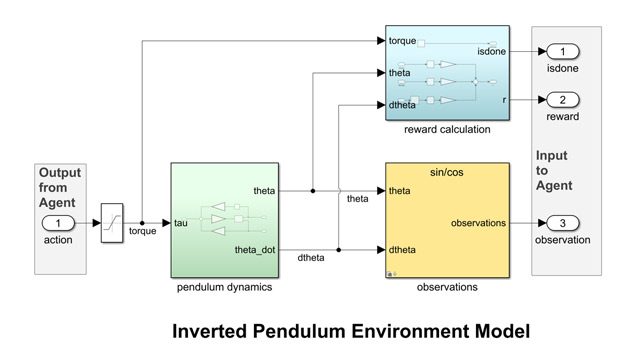
深度強化學習是機器學習的一個分支,它能協助您在面對複雜系統(如機器人和自主系統)時,實現控制器和決策系統。透過深度強化學習,您可以實現深度神經網路,這類網路運用透過模擬模型動態產生的資料進行訓練,進而學習複雜的行為。您只需準備一個模擬模型來代表您正在與之交互並嘗試控制的環境,無需提供標記或者未標記的預定義訓練資料集。
使用MATLAB® Simulink® 以及強化學習工具箱便可讓您執行從設計到部署決策系統的完整流程。利用我們的工具您可以:
- 透過簡單的控制系統、自主系統和機器人範例,初步了解強化學習。
- 只需簡單更改程式碼,便可在常見強化學習演算法間快速切換並評估和比較
- 使用深度類神經網路,根據影像、影片和感測器資料定義複雜強化學習策略
- 使用本機核心或雲端平行執行多個模擬,加速完成策略訓練
- 將強化學習控制器部署到嵌入式裝置上。