H 產品應用 機器人/自主系統 相關資源 MATLAB® & Simulink®於機器人/自主系統設計 簡介 相關資源 立即透過以下資源,了解如何開始使用MATLAB和Simulink來進行機器人相關研發。 平台設計 影片自走機器人的建模與模擬--自走機器人的建模與模擬自走機器人的建模與模擬自走機器人的建模與模擬 規劃出具有多項運動學限制(Multiple Kinematic Constraints)的到達軌跡 以模擬測試機器人的自主性 系列影片如何讓微分方程變成機器人 感測 影片利用MATLAB進行攝影機校正 基本的ROS Messages使用 開始使用ROS 從Simulink產生獨立的ROS節點 影片將ROS節點部署到Raspberry Pi 使用者案例Keio使用MATLAB於大學生的進階機器人課程 感知 影片駕駛輔助系統的交通號誌辨識 影片MATLAB於深度學習:以11行MATLAB程式碼進行深度學習 影片MATLAB於深度學習:以10行MATLAB程式碼進行遷移式學習 範例物件追蹤與跟隨 路徑規劃與決策 利用MATLAB & Simulink設計取放型機器人應用 系列影片自主導航 影片自主機器人的路徑規劃與導航 影片利用MATLAB進行同時定位與地圖構建(Simultaneous Localization and Mapping,SLAM) 影片工業型機器人:從認知到動作 範例各種複雜程度環境的路徑規劃 使用者案例Musashi Seimitsu Industry Co., Ltd.利用MATALB在6個月內開發出工業用自主裝載機器人 使用者案例Tohoku University改善了機器人系統工程課程的學習成果 控制系統 影片利用MATLAB & Simulink進行工業型機器人編程 使用逆向運動學計算致動器力矩 影片在Simulink設計PID控制器 影片支援機械手臂與安全路徑追蹤控制的Simulink模塊 溝通 影片Simulink與ROS入門 從Simulink連結到嵌入了ROS的機器人 CAN Messages的傳送和接收 影片MATLAB提供的Raspberry Pi支援:開始使用MATLAB Support Package於Raspberry Pi硬體 影片安裝適用於Arduino的MATLAB & Simulink Support Package 影片支援PARROT迷你無人機的Simulink Hardware Support Package簡介 投影片利用MATLAB和ROS驗證工業機器人的抓取系統(Yaskawa Electric Corporation)

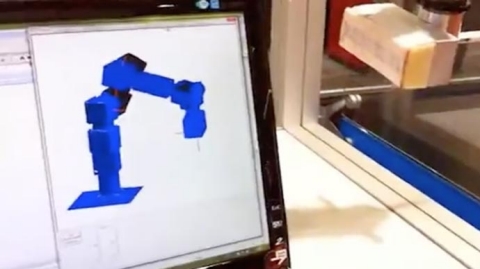
 利用MATLAB & Simulink設計取放型機器人應用
利用MATLAB & Simulink設計取放型機器人應用