![�Q��Simulink�i��q�O�q�l����]�p](/images/hero/sol-power-clarke.jpg)
�Q��Simulink®�i��q�O�q�l����]�p �ϳ��ɦV���� �z�L�����}�o�ϳ��ɦV����t��k
�ϳ��ɦV����q�P���B�úϦP�B��(PMSMs)�B�L�ꪽ�y(BLDC)���F���h�ذ��F�������ѤF�C�w�����̤j��x�κϳ��I���C
- �Ѩ�Ӥ��-�n��(proportional-integral)����զX�Ӧ����q�y���
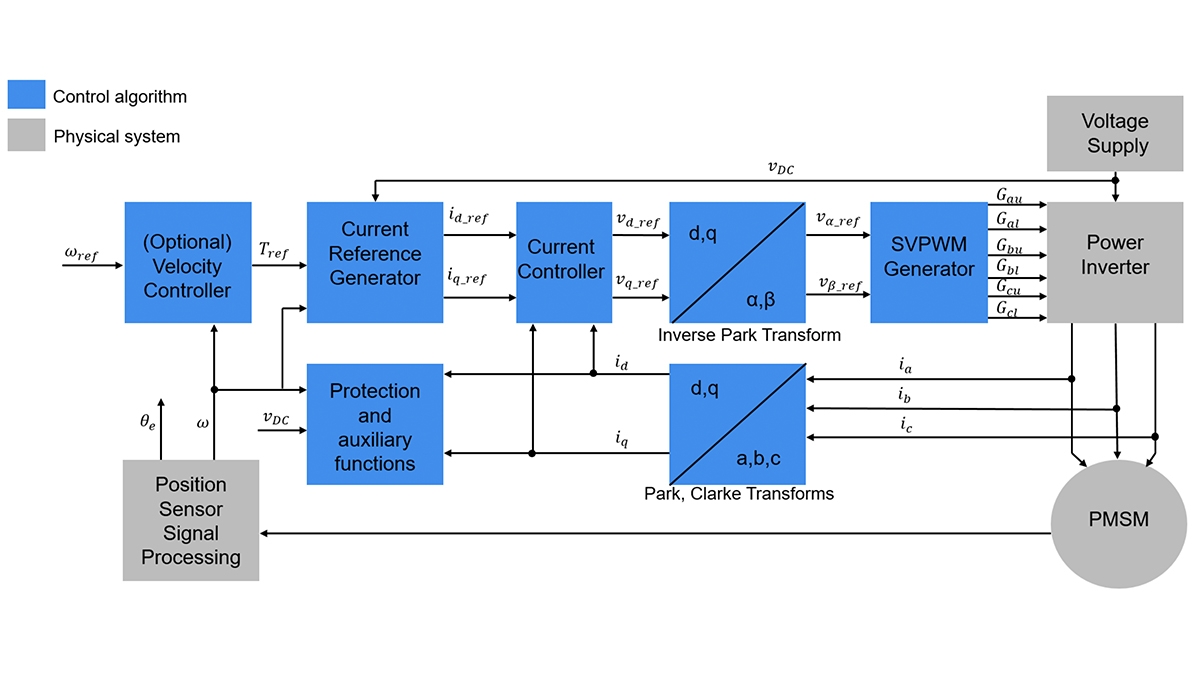
- ��ܩʪ��~�j���t�ױ���ιq�y�ѦҲ��;�(current reference generator)
- �J�ԧJ�ഫ�B���J�ഫ�B�M�f���J�ഫ�A�H�b�R��M����P�B�ج[�����i���ഫ
- �@�ӪŶ��V�q���ܾ��t��k�A�Nv�\�Mv�]���O�ഫ�����Ω�w�l¶�ժ��e���ܾ��T��
- �O�@�M���U�禡�A�]�t�ҰʩM������
- �p�G�Ʊ�ϥεL�P����������A�i�z�L��ܩʪ��[�����Ӧ�����l������
�H�U�Ҷ��Ϯi�ܤF�@�Ӻϳ��ɦV����[�c�A�̭��]�t�F�H�U�X�Ӥ���G
- ���q�y�j��}�o��ƨ��PI���������[�c
- ����ܩʪ��~���t�שM��m�j��}�oPI���
- �վ�Ҧ�PI������W�q�H�����ʯ�n�D
- ������PWM�]�p�@�ӪŶ��V�q���ܾ�
- �b�ϥεL�P��������ɡA�]�p�@���[�����t��k�Ӧ�����l��m�H�γt��
- �]�p�C�w�����̤j��x�κϳ��I���t��k�Ӳ��ͳ̾Aid_ref�Miq_ref
- ��{��B��IJv�����J�ഫ�B�J�ԧJ�ഫ�B�M�f���J�ഫ
- �]�p�G�ٰ����M�O�@��
- ���ҩM���籱��b���P�ާ@����U���ʯ�
- �b�L�����FPGA�W��{�w�I�ίB�I���
���F����u�{�v�b�]�p�ϳ��ɦV����ɻݭn����H�U���ȡG
�ϥ�Simulink�Ӷi��ϳ��ɦV����]�p�A�i���U�A�b�w����դ��e�ϥΦh�t�v�����ӳ]�p�B�վ�B�����ұ���t��k�A�����íץ����F�b�U�عB�@����U�o�ͪ����~�C�z�LSimulink�Ӽ����A�A�i�H��֭쫬���ժ����ơA�åB���ұ���t��k�������H��w��W�i����ժ��G�ٱ���í���ʡC�A�i�H�G
- �إߦU�����������F�ҫ��A���O�P�B�M�D�P�B���T�۹q���C�A�i�H�إߤ��P�G�u�{�ת��ҫ��A�q²�檺�Ĥ@��z���@����(lumped-sum)�ҫ��A���ǥ�ANSYS® Maxwell®�MJMAG®��FEA�u��פJ�ӫإߪ����G�u�B�H�ϳq�q����¦���D�u�ʼҫ��A�æb�o�Ǽҫ������i������C
- �إ߹q�y����B�t�ױ���B�H�ν��ܾ��ҫ��C
- �إߤϦV���q�O�q�l�ҫ��C
- �Q�Ϊi�w�ϡB�ڭy�u�ʱ���]�p�ޥ��A�H��PID�۰ʽվ㵥�ޥ��ӽվ㱱��t�μW�q�C
- �إ߱ҰʡB�����B�H�ο��~�Ҧ��ҫ��A�ó]�p���B�ΫO�@��ӽT�O�B�@�w���C
- �]�p�[�����t��k�Ӧ��p��l��m�M�t��
- �u��id_ref�Miq_ref�ӽT�O�\�ӡB�W�L��l���`�t�ת��B�@���p�ҳ̤֡A�B�b�ѼƤ��T�w������U�]�i���`�B�@�C
- �]�pI/O�q�D���T���ո`�M�B�z�t��k�C
- ���氨�F�M��������X�j�������A���ըt�Φb���`�M���`�ާ@���ҤU���ʯ�C
- �۰ʲ���ANSI�BISO�ΰw��B�z���u�ƹL��C�{���X��HDL�A�H�i��ֳt�쫬�ơB�w��j����աB�P�Ͳ���{�C