智慧型即時控制系統-EMECS
運作原理
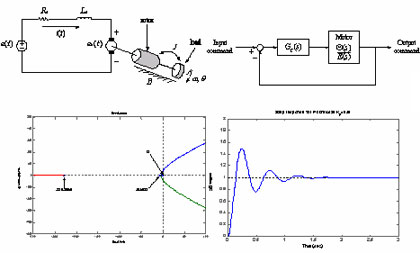
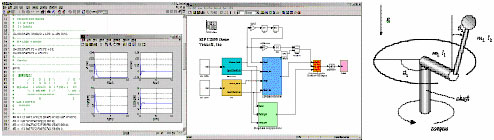
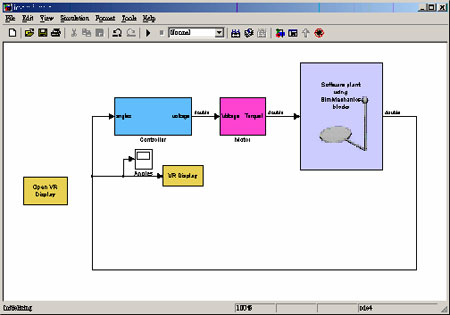
2 . EMECS 理論及模型 旋轉型倒單擺系統中,主要由伺服馬達和擺臂、單擺桿所構成,以伺服馬達當致動器來轉動擺臂使其進行圓周運動,控制單擺甩起後直立不倒。本系統以 MATLAB Simulink 進行控制器設計與系統動態模擬圖如下: