MATLAB® & Simulink® 於自主移動機器人的應用發展
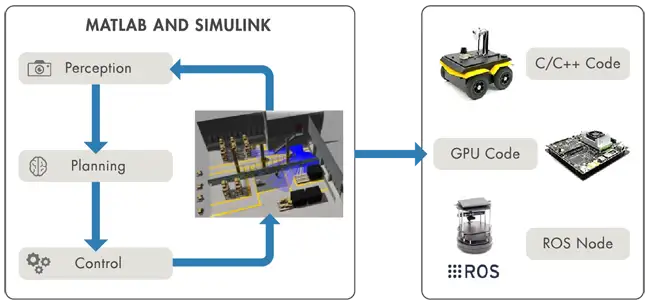
MATLAB & Simulink 為開發自主移動機器人(AMR)、服務機器人和其他無人地面車輛(UGV) 提供演算法、建模、模擬工具,以及ROS和硬體連接支援。
使用 MATLAB 與 Simulink,可達成:
- 導入機器人的虛擬模型並完善機械設計和電氣元件的需求
- 模擬慣性導航系統(INS)和GNSS感測器的感測器模型
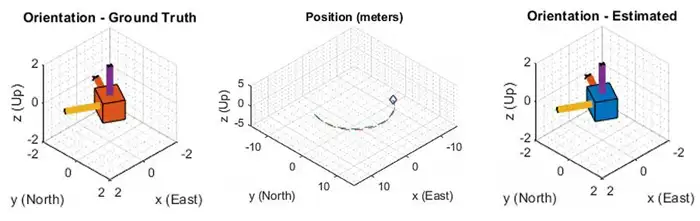
- 使用粒子濾波器和蒙地卡羅定位等演算法進行機器人定位
- 使用同步定位和地圖建構(SLAM)演算法建立環境地圖
- 使用路徑規劃演算法(如A*或 RRT)尋找最佳路徑
- 使用路徑指標(如平滑度和障礙物淨距)評估路徑的最適性
- 使用路徑追蹤和避障控制演算法以在動態環境中進行導航
- 為目標硬體自動生成生產程式碼