MATLAB® & Simulink® 機器人與自主系統 從感知到運動 自主應用程式的開發及系統級行為的最佳化
機器人研究員和工程師透過MATLAB和Simulink進行自主系統的設計、模擬和驗證,包括感知到運動層面。
- 對機器人系統進行建模,如感測器雜訊和馬達振動等等細節。
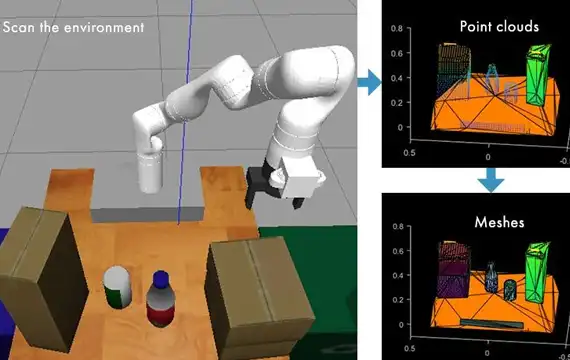
- 模擬具備精確的運動學、動力學和接觸特性的機器人系統。
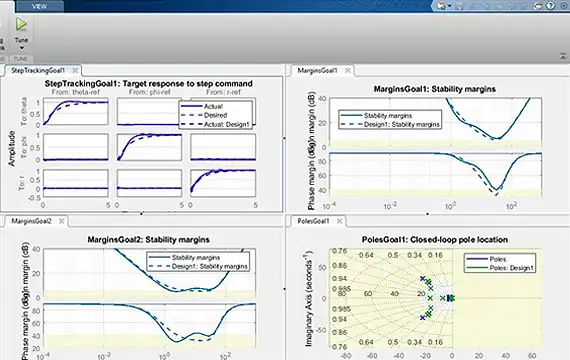
- 設計和優化高階自主決策和低階控制。
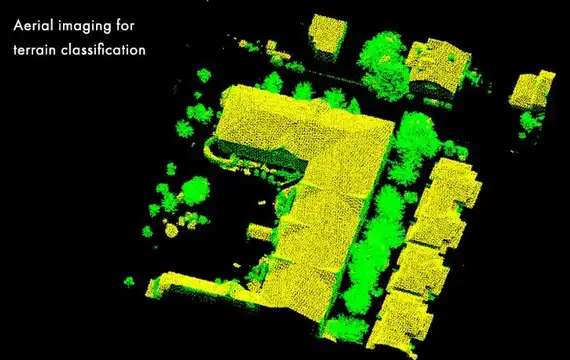
- 透過完善維護的演算法庫合成和分析感測器數據。
- 逐步驗證機器人設計或演算法,從模擬到硬體迴圈(HIL)測試。
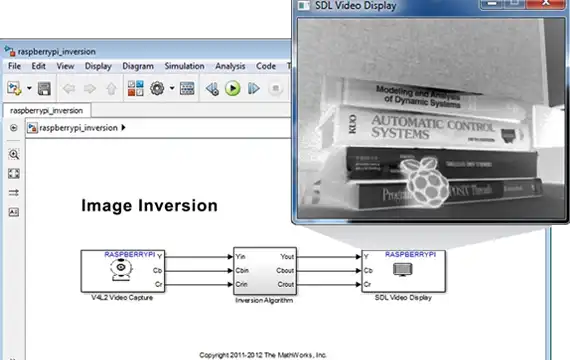
- 透過ROS將演算法部署到機器人或直接部署到微控制器、FPGA、PLC和GPU。